
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | ||||
| 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 11 | 12 | 13 | 14 | 15 | 16 | 17 |
| 18 | 19 | 20 | 21 | 22 | 23 | 24 |
| 25 | 26 | 27 | 28 | 29 | 30 | 31 |
- ros 제어
- ros rqt
- 가상환경
- ros network
- ros 실시간
- ROS 노드
- ROS topic
- 우분투
- Node
- ROS 초보
- ROS 기초
- ros 입문
- ROS
- ros 공부
- ros 로봇
- ros rqt_tf_tree
- piracer
- ros 파라미터
- ros launch
- ros node
- ros cfg
- 리눅스
- ros 동적 파라미터
- ros 정적 파라미터
- ros 3d
- 라즈베리파이
- 노드
- ros link
- ros tf
- ros rviz
- Today
- Total
대원의 블로그
[ROS #06] ROS Launch 이해하기 본문
이번 글에서는 ROS Launch 파일을 이해해보고자 한다.
참고자료:
https://www.youtube.com/watch?v=tH3_xl5IOjY&list=PLoc4bSmQajN-y88btKBK6lvAbrTtJDrYs&index=10
https://www.youtube.com/watch?v=tn4WXxIuSfQ&list=PLoc4bSmQajN-y88btKBK6lvAbrTtJDrYs&index=11
ROS Launch란?
ROS launch는 여러개의 노드를 한번의 명령으로 실행할 수 있게 해준다.
특정 코드를 짜고나서 하나씩 실행시키기 어려우니 실행 파일(exe)를 만드는 개념으로 이해하면 될 듯하다.
ROS를 사용하는 이유
- 여러개의 노드를 한번에 실행할 수 있다.
- 실행시 roscore가 자동으로 실행이 된다.
- 같은 노드라도 이름을 바꾸어 동시에 여러개 실행이 가능하다.
- 여러가지 옵션을 사용한다. (스크린 출력, 다시 실행)
- 파라미터를 설정할 수 있다.
ROS Launch 작성
실행을 원하는 패키지에 들어가서 launch 파일을 만든 다음에 launch 폴더를 실행한다.
우선 기본적인 뼈대는 다음과 같다.

<?xml version="1.0"?>
<lauch>
</launch>이후 파일을 한번 저장하고서 나머지 부분을 입력해주면 된다.
이후 launch 파일이 잘 작동이 되는지 확인을 해주면 되는데 launch 파일은 컴파일 없이도 동작한다.

이제 본격적으로 노드를 실행하기 위한 코드를 작성하는데
<?xml version="1.0"?>
<launch>
<node pkg="패키지 이름" type = "실행시킬 노드의 이름" name = "원하는 이름(바꿔도 됨)"/>
<node pkg="basic_tutorial" type = "basic_node" name = "basic_node"/>
</launch>
<?xml version="1.0"?>
<launch>
<node pkg="basic_tutorial" type = "basic_node" name = "basic_node"/>
<node pkg="basic_tutorial" type = "basic_node" name = "basic_node2"/>
</launch>
추가 명령어&주석 처리 방법
<?xml version="1.0"?>
<launch>
<!-- 여기에 주석을 작성할 수 있음 -->
<node pkg="basic_tutorial" type = "basic_node" name = "basic_node" output = "screen"/>
<node pkg="basic_tutorial" type = "basic_node" name = "basic_node2"/>
</launch>
독립된 ROS Launch를 만드는 방법
launch 파일을 만들다보면 다른 패키지에 있는 launch 파일들도 이용해서 만들고 싶을 수 있다.
이럴때에는 독립적인 패키지를 만들어서 실행시키는게 나중을 위해서 좋다고 한다.
<?xml version="1.0"?>
<launch>
<!-- 다른 런치 파일을 실행할 수도 있음 -->
<include file="$(find basic_tutorial)/launch/basic_tutorial.launch"/>
<!-- 다른 노드들도 똑같이 작성해보기 -->
<node pkg="basic_publisher_tutorial" type = "basic_publish_node" name = "new_publish"/>
<node pkg="basic_subscribe_tutorial" type = "basic_subscribe_node" name = "new_subscribe"/>
</launch>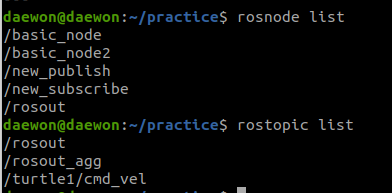
여기까지 ROS launch에 대해서 알아보았다.
'개발 > ROS' 카테고리의 다른 글
| [ROS #08] ROS Network 이해하기 (0) | 2024.10.21 |
|---|---|
| [ROS #07] ROS Service 이해하기 (0) | 2024.10.21 |
| [ROS #05] ROS Topic 이해하기 (0) | 2024.10.15 |
| [ROS #04] ROS 환경 구조 이해하기 (1) | 2024.10.15 |
| [ROS #03] ROS Node 이해하기 (0) | 2024.10.14 |



